Nguyên lý hoạt động của một quadcopter
Nguyên lý hoạt động của QuadCopter được ứng dụng rộng rãi loại drone có 4 động cơ như flycam, máy bay nông nghiệp,… nó là cơ chế điều tốc tốc độ 4 cánh quạt từ đó điều khiển drone theo ý mình.
Quadcopter là mô hình bay hoạt động dựa trên nguyên lý cân bằng góc nghiêng của từng cặp động cơ đặt đối diện nhau, vấn đề khó ở đây là làm sao để điều khiển bốn động cơ giúp cho máy bay có thể cân bằng từng trục, kết hợp cân bằng các trục với nhau, triệt tiêu quán tính xoay tròn và điều khiển Quadcopter di chuyển ổn định.
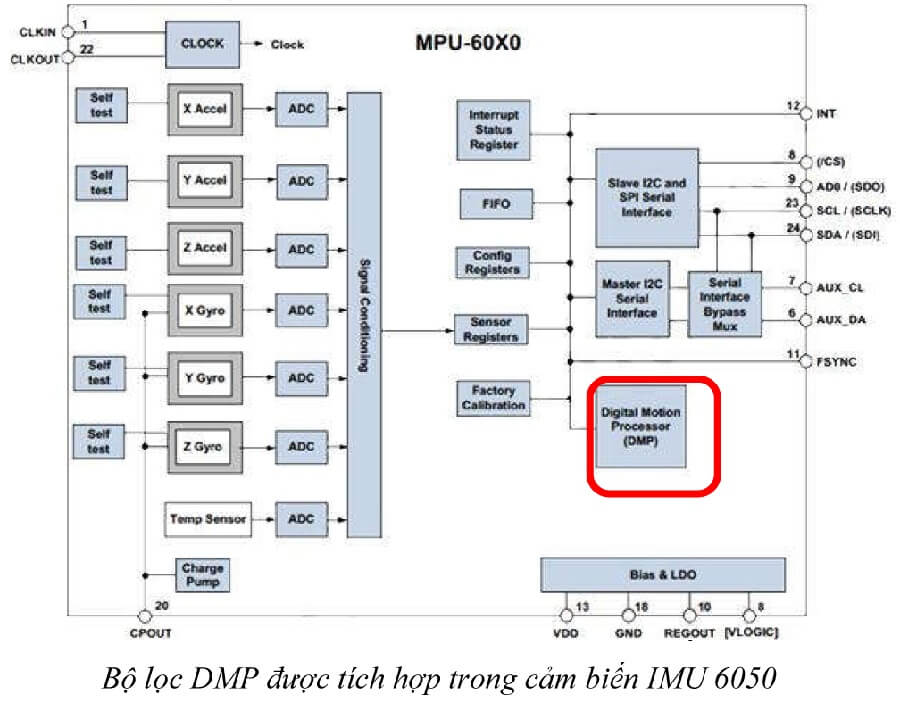
Giá trị quan trọng giải quyết vấn đề trên là giá trị góc nghiêng đọc từ cảm biến phải chính xác. Bộ lọc DMP (Digital Montion Processor) được sử dụng phải đảm bảo độ chính xác và ổn định dữ liệu góc nghiêng.
I. NGUYÊN TẮC HOẠT ĐỘNG CỦA QUADCOPTER
Nguyên lý hoạt động của quadcopter dựa trên bốn nền tảng như sau:
- Nguyên lý cân bằng.
- Nguyên lý di chuyển
- Nguyên lý điều khiển động cơ ba pha không chổi than.
- Bộ lọc DMP
1.1. Nguyên lý cân bằng
Máy bay Quadcopter có dạng hình chữ thập hay dấu cộng được trang bị bốn động cơ ở bốn góc. Hai trục chéo của máy bay được đặt theo hai trục X và Y của hệ trục tọa độ Descartes. Mỗi động cơ kết hợp với cánh quạt sẽ tạo ra một lực đẩy và moment xoắn nhất định, bốn cánh quạt được chia thành 2 nhóm có chiều quay ngược nhau, hai cánh đối diện quay cùng chiều. Điều này giúp moment xoắn bị triệt tiêu nếu 4 cánh quạt cùng một vận tốc.

1.2. Nguyên lý duy chuyển
Điều khiển mô hình bay Quadcopter chúng ta có hai phương pháp là kiểu hình chữ X và chữ thập (dấu cộng). Phương pháp điều khiển dạng chữ X được sử dụng trong điều khiển hướng bay của mô hình, bởi vì thay đổi hướng được thực hiện bởi hai động cơ. Việc thay đổi tốc độ bay của động cơ vừa làm cho mô hình cân bằng, vừa dùng để điều khiển mô hình di chuyển.
 Nguyên lý điều hướng Quadcopter
Nguyên lý điều hướng Quadcopter
1.3. Nguyên lý điều khiển động cơ ba pha không chổi than
Mỗi động cơ ba pha không chổi than được điều khiển thông qua một bộ ESC (Electronic Speed Control) riêng biệt. ESC thay đổi tốc độ quay của động cơ dựa vào độ rộng xung của tín hiệu PWM (Pulse-width modulation) ừ mạch điều khiển chính. Độ rộng xung điều khiển tốc độ động cơ giới hạn trong khoảng 1-2 ms và tần số điều khiển là 50Hz.
1.4. Bộ lọc DMP
Đối với các loại cảm biến vi cơ điện tử (MEMS) rất dễ bị toán xử lý trực tiếp trên chip IMU-6050 giúp giải phóng tài nguyên của bộ vi điều khiển trung tâm.
Bộ lọc sẽ tính toán cho ra các giá trị trong hệ tọa độ Quaternions sau đó chuyển sang góc Euler theo công thức:
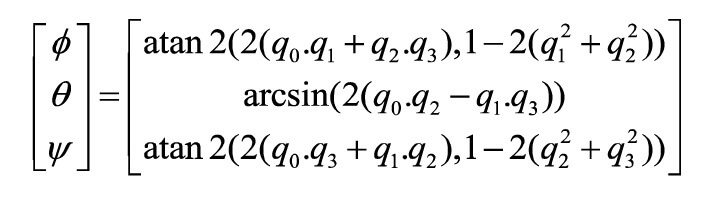
để thu được các giá trị Yaw (trục Z), Pitch (trục Y), Roll (trục X) mong muốn.
II. THUẬT TOÁN ĐIỀU KHIỂN QUADCOPTER
Sơ đồ điều khiển PID được đặt tên theo 3 khâu hiệu chỉnh đó là khâu tỉ lệ, khâu tích phân và khâu vi phân, ngõ ra điều khiển tốc độ của 4 động cơ là tổng của 3 khâu nà.
Ta có:
Output(t)= Pout + Iout + Dout
Trong đó:
- Pout: là thành phần đầu ra khâu tỉ lệ.
- Iout: là thành phần đầu ra khâu tích phân.
- Dout: là thành phần đầu ra khâu vi phân.
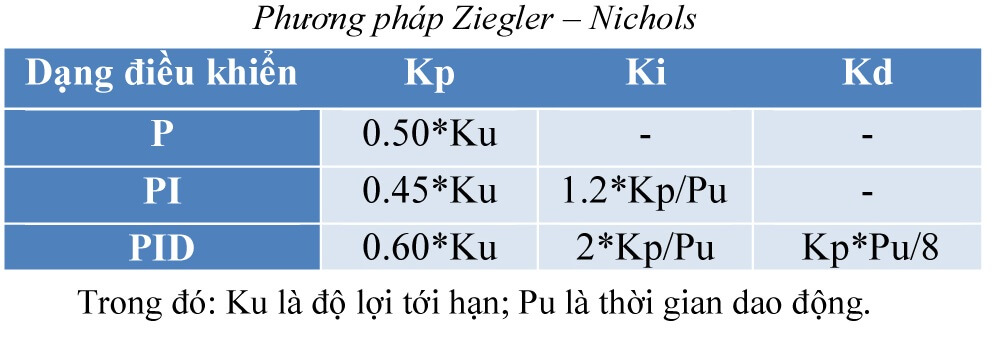
Vấn đề khó khăn khi sử dụng thuật toán PID để điều khiển mô hình là việc lựa chọn các giá trị Kp, Ki, Kd.
Ở đây ta sử dụng phương pháp Ziegler-Nichols kết hợp với thực nghiệm.
Việc xác định các thông số PID của mô hình máy bay rất phức tạp và phải thay đổi liên tục để có thể làm cho máy bay đạt được sự cân bằng và ổn định.
2.1. Sơ đồ tổng quát
Chức năng các khối trong sơ đồ:

- Khối điều khiển (Arduino Pro Micro) là khối điều khiển trung tâm, nhận dữ liệu góc nghiêng, vận tốc góc từ khối IMU GY 86 sử dụng giao tiếp
- I2C và dùng ngắt ngoài để lấy tín hiệu điều khiển từ khối Receiver, thực hiện giải thuật PID tính toán và xuất tín hiệu điều khiển PWM ra 4 khối ESC.
- Khối cảm biến (IMU GY 86) là khối lấy dữ liệu độ nghiêng trục (Angle) X, Y, Z và góc (Rate) X, Y, Z truyền về khối Arduino Pro Micro theo chuẩn giao tiếp I2C.
- ESC là các khối driver dùng để điều khiển động cơ 3 pha không chổi than. Khối này nhận tín hiệu PWM từ Arduino Pro Micro.
- Transmitter là khối truyền tín hiệu điều khiển cân bằng và di chuyển. Khối truyền tín hiệu đi dưới dạng sóng RF (Radio Frequency).
- Receiver nhận tín hiệu điều khiển hướng từ bộ giải mã và gửi tín hiệu về khối Arduino Pro Micro.
2.2. Giải thuật cân bằng
a) Cân bằng trục X, Y

Đầu tiên, bộ xử lý nhận giá trị điều khiển từ bộ điều khiển từ xa với giá trị ban đầu 1000us- 2000us, sau đó so sánh giá trị nhận được với giá trị mẫu là 1500us.
Nếu giá trị nhận được lớn hơn giá trị mẫu thì bộ xử lí thực hiện chế độ cân bằng góc với tần số lấy mẫu là 50Hz và giới hạn góc nghiêng tỏng khoảng -15 đến 15 độ. Sau đó tiếp tục thực hiện xử lý giá trị cảm biến thông qua PID góc. Giá trị sau khi xử lý trong PID góc sẽ được lấy để làm giá trị đầu vào của PID cân bằng di chuyển.
Nếu giá trị nhận được nhỏ hơn giá trị mẫu thì bộ xử lý thực hiện chế độ cân bằng di chuyển, làm cho các giá trị góc nghiêng giống như trục chuẩn. Với tần số lấy mẫu là 400Hz. Sau khi xử lý thì giá trị đầu ra được đưa vào PID Rate để thực hiện việc cân bằng cho mô hình.
Giá trị sau khi xử lý bằng giải thuật PID Rate sẽ được kết hợp với giá trị điều khiển tốc độ từ bộ điều khiển từ xa để làm thay đổi tốc độ của động cơ.
Cách lựa chọn thông số Kp, Ki và Kd:
Đặt máy bay ở chế độ Mode Rate (chế độ cân bằng di chuyển) sau đó thực hiện bước điều chỉnh các thông số Kp, Ki, Kd:
Bước 1: Tăng 50% giá trị điều khiển tốc độ (AUX > 1500us).
Bước 2: tăng Kp cho tới khi xuất hiện dao động. Sau đó giảm 10% giá trị Kp vừa tìm được.
Bước 3: Tăng Kd cho tới khi xuất hiện dao động. Sau đó trừ 20% giá trị Kd vừa tìm được.
Bước 4: Lặp lại bước 1 với những giá trị thay đổi nhỏ cho đến khi xuất hiện dao động.
Bước 5: Tăng Ki cho đến khi máy bay ổn định.
Bước 6: Tinh chỉnh các thông số để mô hình đáp ứng tốt khi có sự ảnh hưởng bởi các yếu tố bên ngoài như gió. Việc cân bằng trục Y được thực hiện tương tự như với trục X
Các thông số Kp, Ki, Kd được lựa chọn bằng cách kết hợp phương pháp thực nghiệm và Ziegler- Nichols. Các thông số thực nghiệm được xác định theo giá trị được lựa chọn bằng phương pháp Ziegler- Nichols sao cho giá trị thực nghiệm là các giá trị gần bằng với giá trị được chọn từ phương pháp Ziegler- Nichols.
B ) Cân bằng trục Z

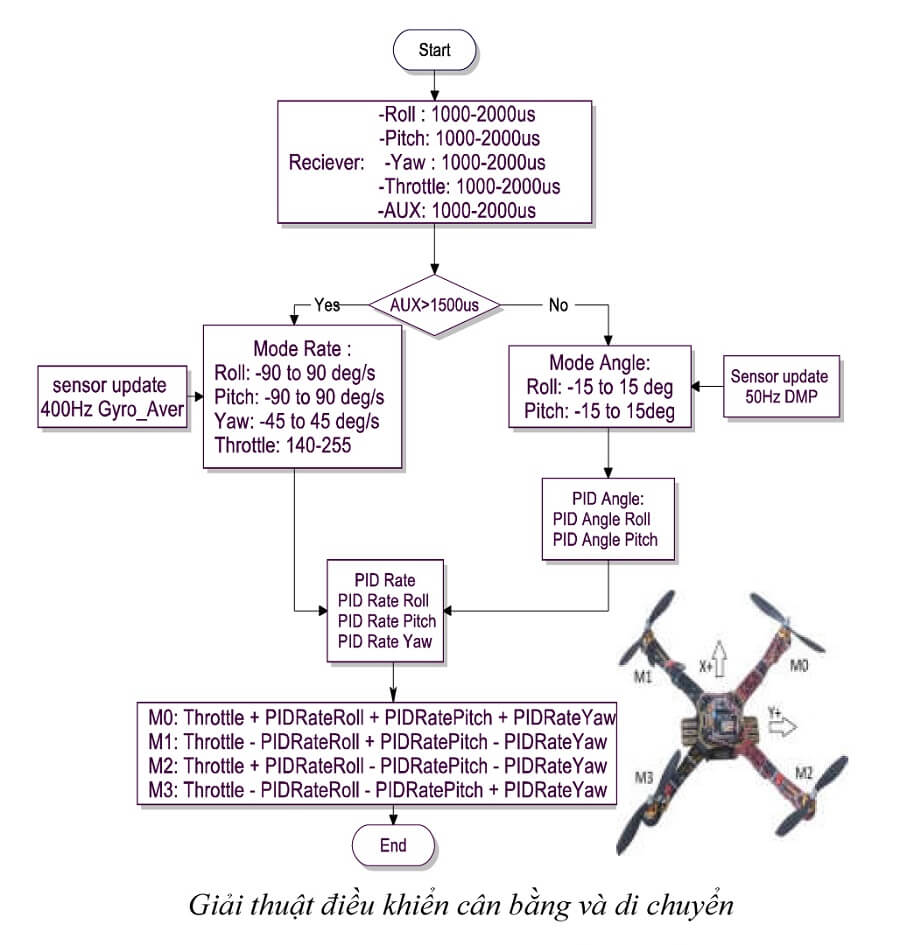
Dựa trên nền tảng của thuật toán điều khiển PID, giải thuật cân bằng và di chuyển trên mô hình Quadcopter được xây dựng theo lưu đồ như hình trên.
Sử dụng ngắt ngoài đọc dữ liệu từ bộ thu với giá trị từ 1000- 2000, sau đó lấy tỉ lệ theo công thức:

Với X là giá trị đặt Roll, Pitch, Yaw, Throttle (tốc độ). Các giá trị góc Roll, Ritch được lấy mẫu với tần số 50Hz và giá trị Gyro_Aver X, Y, Z ở tần số 400Hz, PID Angle có nhiệm vụ cân bằng xung quanh góc 00. PID Rate giúp cho máy bay di chuyển với góc đặt từ bộ điều khiển từ xa Quadcopter
CHƯƠNG TRÌNH KHẢO SÁT & TRẢI NGHIỆM ĐẶC BIỆT
💡 Với mong muốn nhận được những đóng góp về thực trạng sử dụng Chatbot AI. Đặc biệt là những vấn đề không hài lòng trong quá trình sử dụng của quý khách hàng.
🚀 Chúng tôi sẵn sàng cung cấp những trải nghiệm miễn phí hệ thống Chatbot AI.
📩 Để nhận trải nghiệm miễn phí, xin vui lòng gửi thông tin tài khoản của Anh/Chị tới email chính thức: contact@bacninhtech.com
✨ Chúng tôi sẽ hỗ trợ Anh/Chị trải nghiệm miễn phí dịch vụ của chúng tôi và rất mong nhận được những ý kiến đóng góp tích cực từ phía Anh/Chị để hệ thống ngày một hoàn thiện hơn!
Ý kiến của bạn sẽ giúp hệ thống phục vụ tốt hơn! Chúng tôi đánh giá cao sự trung thực của bạn.
Để tìm hiểu chi tiết dịch vụ thiết kế website- Chatbot AI xin vui lòng liên hệ:
MỘT SỐ TÍNH NĂNG NỔI BẬT CHATBOT AI
Chủ đề: learn , learndrone , quadcopter ,