Bộ điều khiển PID (Phần 2)
PID là thuật toán được sử dụng rộng rãi trong các nguyên lý điều khiển quadcopter, đây là mô hình được sử dụng phổ biến trong mô hình thiết kế cánh quạt của drone, flycam hay cả những dòng máy bay nông nghiệp hiện đại. có công thức:
MV(t)= Pout+ Iout+ Dout
Trong đó các thành phần Pout , Iout , Dout là ba thành phần của ba khâu trong bộ điều khiển PID được xác định như sau:
1. Khâu tỷ lệ Pout
Đây là khâu làm thay đổi giá trị đầu ra, hay còn được gọi là ‘độ lợi’. Nó tỷ lệ với hệ số sai số hiện tại, để tính hệ số này chúng ta lấy hằng số được gọi là hằng số tỷ lệ Kp nhân với sai số, Công thức:
Pout= Kp*e(t)
Trong đó giá trị các thông số như sau:
- Pout: thừa số tỉ lệ đầu ra.
- Kp: Hệ số tỉ lệ, thông số điều chỉnh
- e: sai số= SP- PV
- t: thời gian hiện tại
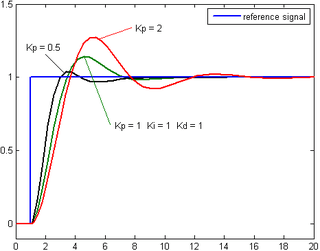
Đồ thị PV theo thời gian, ba giá trị Kp (Ki và Kd là hằng số)
Nếu hệ số khâu tỉ lệ quá cao hệ thống sẽ không ổn định do hệ số này lớn là do ở đầu ra thây đổi lớn nhưng sai số thay đổi nhỏ. Ngược lại hệ số này nhỏ là do đầu ra nhỏ trong khi sai số đầu vào lớn làm bộ điều khiển kém nhạy.
Độ trượt (Drop):
Là sai số ổn định trạng thái là một hàm của độ lợi tỉ lệ và độ lợi quá trình. Đặc biệt, nếu độ lợi quá trình-trong khoảng thời gian dài bị trôi do thiếu điều khiển, như việc làm mát một lò nung tới nhiệt độ phòng-được ký hiệu G và giả sử sai số xấp xỉ là hằng số, khi đó droop-độ trượt xảy ra khi độ lợi không đổi này bằng thừa số tỉ lệ của đầu ra, Pout, với sai số là tuyến tính, G= Kpe do đó e= G/Kp
Khâu tích phân
Khâu tích phân hay còn được gọi là reset, nó tỷ lệ thuận với cả biến sai số và quảng thời gian sai số xảy ra, tích phân cho ta tổng sai số tức thời theo thời gian. Tích lũy bù này sau đó được nhân với độ lợi tích phân và cộng với tín hiệu đầu ra của bộ điều khiển. Biên độ phân phối của khâu tích phân trên tất cả tác động điều chỉnh được xác định bởi độ lợi tích phân là Ki:

Trong đó các giá trị như sau:
- Iout : thừa số tích phân của đầu ra
- Ki : độ lợi tích phân, 1 thông số điều chỉnh
- e : sai số = SP- PV
- t : thời gian hoặc thời gian tức thời (hiện tại)
- Ƭ: một biến tích phân trung gian
Khâu tích phân sau khi công với khâu tỉ lệ chúng sẽ tăng tốc chuyển động của quá trình tới điêm đặt. Tuy nhiên, vì khâu tích phân là đáp ứng của sai số tích lũy trong quá khứ, nó có thể khiến giá trị hiện tại vọt lố qua giá trị đặt. Để tìm hiểu thêm các đặc điểm của việc điều chỉnh độ lợi tích phân và độ ổn của bộ điều khiển, xin xem phần điều chỉnh vòng lặp.
Khâu Đạo Hàm
Để tính tốc độ thay đổi sai số trong quá trình tính toán ta nhân độ dốc của sai số theo thời gian và độ lợi tỉ lệ Kd. Biên độ của khâu vị phân hay còn được gọi là tốc độ trên tất cả các hành vi điều khiển được giới hạn bởi độ lợi vi phân, Kd.
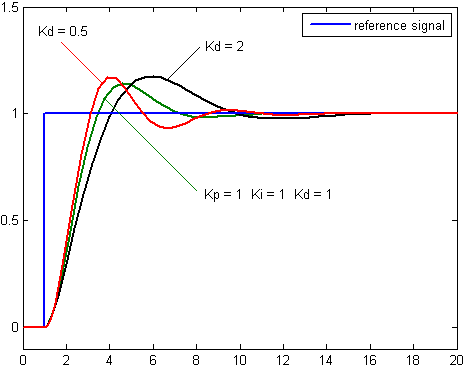
Đồ thị PV theo thời gian, với 3 giá trị Kd (Kp and Ki không đổi)
Thừa số vi phân được cho bởi:

Trong đó các thông số:
- Dout: thừa số vi phân của đầu ra
- Kd: Độ lợi vi phân, một thông số điều chỉnh
- e: Sai số = SP- PV
- t: thời gian hoặc thời gian tức thời (hiện tại)
Khâu vi phân làm chậm tốc độ thay đổi của đầu ra bộ điều khiển và đặc tính này là đáng chú ý nhất để đạt tới điểm đặt của bộ điều khiển. Từ đó, điều khiển vi phân được sử dụng để làm giảm biên độ vọt lố được tạo ra bởi thành phần tích phân và tăng cường độ ổn định của bộ điều khiển hỗn hợp.
Tuy nhiên, phép vi phân của một tín hiệu sẽ khuếch đại nhiễu và do đó khâu này sẽ nhạy hơn đối với nhiễu trong sai số, và có thể khiến quá trình trở nên không ổn định nếu nhiễu và độ lợi vi phân đủ lớn. Do đó một xấp xỉ của bộ vi sai với băng thông giới hạn thường được sử dụng hơn. Chẳng hạn như mạch bù sớm pha.
CHƯƠNG TRÌNH KHẢO SÁT & TRẢI NGHIỆM ĐẶC BIỆT
💡 Với mong muốn nhận được những đóng góp về thực trạng sử dụng Chatbot AI. Đặc biệt là những vấn đề không hài lòng trong quá trình sử dụng của quý khách hàng.
🚀 Chúng tôi sẵn sàng cung cấp những trải nghiệm miễn phí hệ thống Chatbot AI.
📩 Để nhận trải nghiệm miễn phí, xin vui lòng gửi thông tin tài khoản của Anh/Chị tới email chính thức: contact@bacninhtech.com
✨ Chúng tôi sẽ hỗ trợ Anh/Chị trải nghiệm miễn phí dịch vụ của chúng tôi và rất mong nhận được những ý kiến đóng góp tích cực từ phía Anh/Chị để hệ thống ngày một hoàn thiện hơn!
Ý kiến của bạn sẽ giúp hệ thống phục vụ tốt hơn! Chúng tôi đánh giá cao sự trung thực của bạn.
Để tìm hiểu chi tiết dịch vụ thiết kế website- Chatbot AI xin vui lòng liên hệ:
MỘT SỐ TÍNH NĂNG NỔI BẬT CHATBOT AI
Chủ đề: pid , learn , learndrone ,